ICT Nuclear Plant Dismantling Project
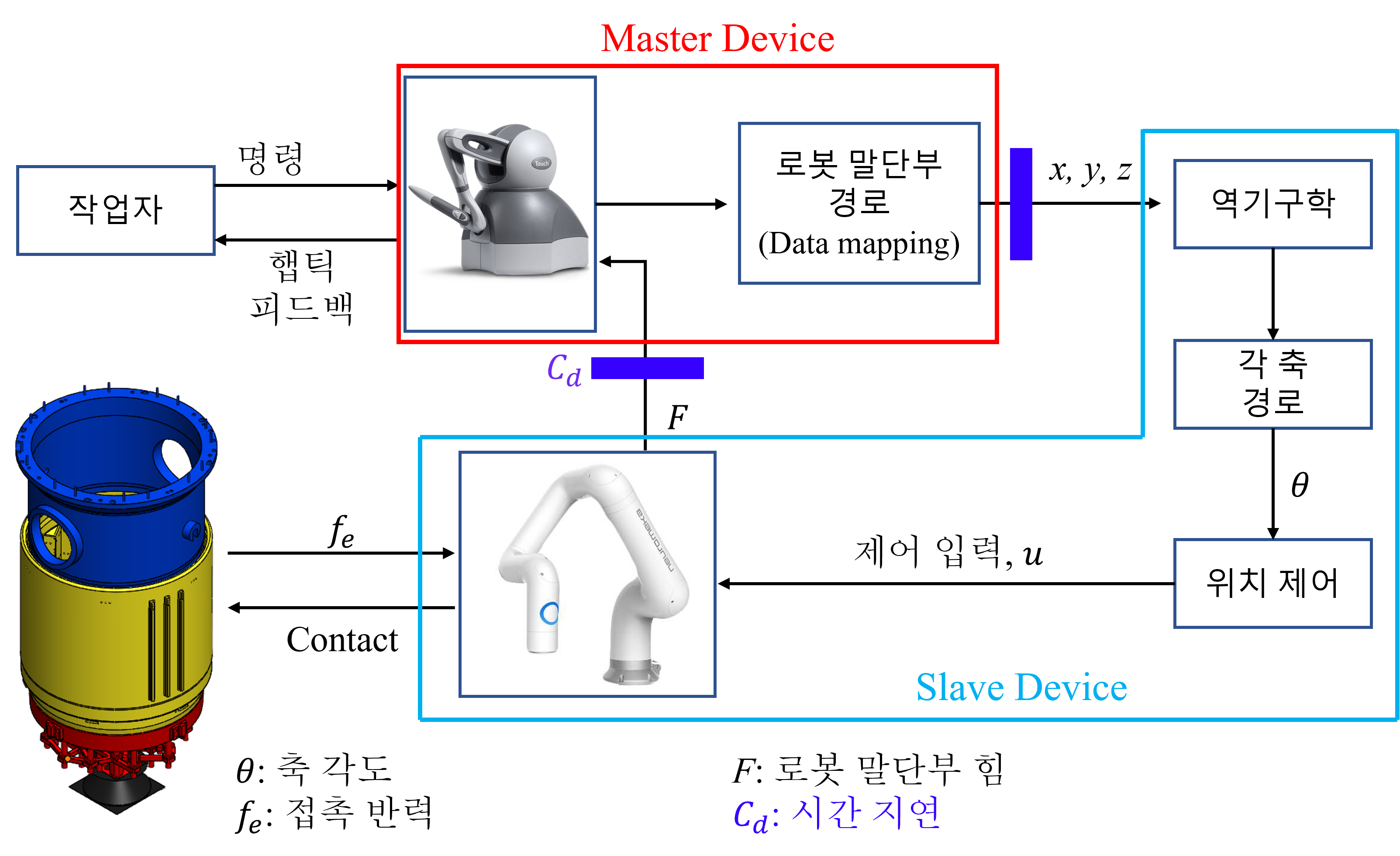
- Nuclear dismantling simulation project using haptic feedback biliteral communication
- Use Sliding Perturbation Observer to estimate the reaction force
- Operator can simulate dismantling job with dismantle simulator
IT Convergence Treadmill System for Cardiac Rehabilitation
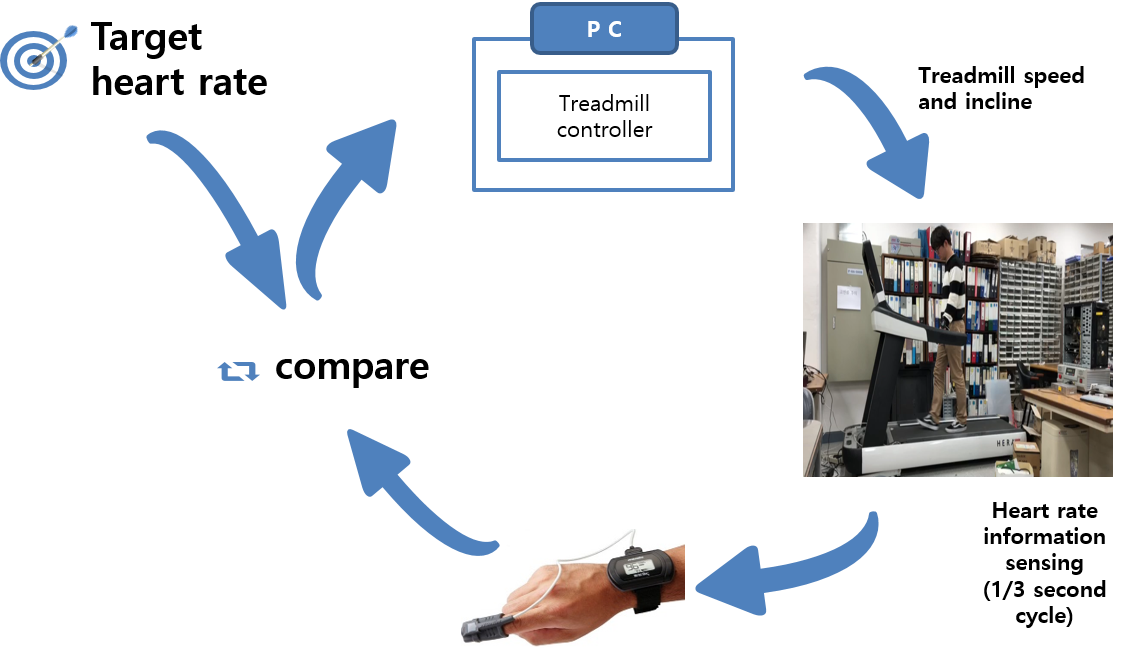
- Heart rate information feedback to maintain patient's target heart rate during exercise
- Use Bluetooth communication for heart rate information sensing
- The patient's heart rate is transmitted to the hospital and stored in the mobile phone app and PC
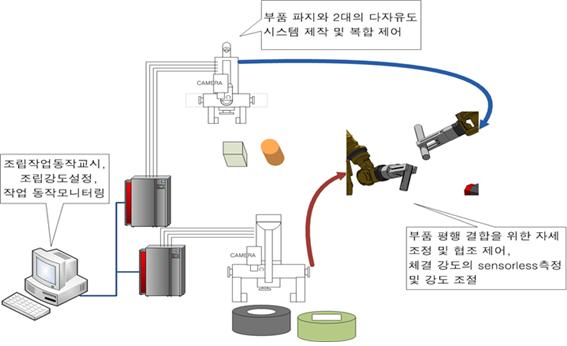
Development of Robot Manipulation Technology by Using A.I.
- Object recognition technology using artificial intelligence
- User friendly AI-based teaching and parts grasping algorithm
- Development of force estimation based assembly algorithm
Special Environment Localization/Navigation study
Indoor Autonomous vehicle technology for dynamic environment
- Study of sensor analysis and sensor fusion for Autonomous driving in an indoor environment
- Study the application of indoor environment recognition sensor (vision, laser range finder, ultrasonic, etc.)
- Study of sensor combination technology for multi-sensor mixing applications
Development of driving behavior control technology in a dynamic outdoor environment
- Building position recognition for a downtown environment using JSEG
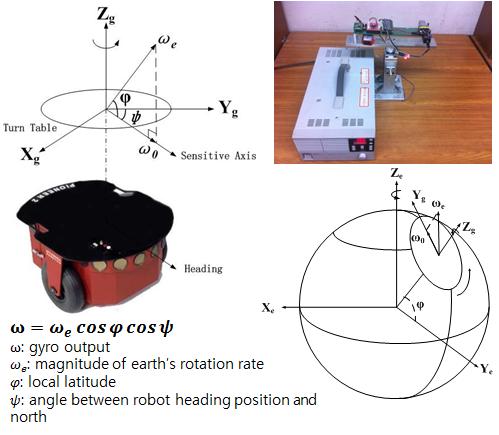
Study of sensor fusion and autonomous driving technology for special environments
- Study of position recognition algorithm for GPS and Multi-sensor fusion robot
- Study of an autonomous driving algorithm for inapplicable magnetic sensor environment
- Study of north finding technology using MEMS Gyro sensor
Basic study for swarm autonomous driving
- Development of unit robot for swarm autonomous driving system
- Implementation of formation control algorithm using potential field algorithm
- Performance of basic study for swarm driving method
Study of National defense robot

Cooperational control for UGV/UAV integrated operation
- Architecture design, algorithm development, and performance evaluation for moving UGV/UAV
- Cooperation control architecture design and performance evaluation for UGV/UAV integrated operation
- Development of algorithm and performance verification for imitating experiment
- Hybrid behavior pattern decision, multi-robot learning technology, distributed control system, autonomous driving control technology
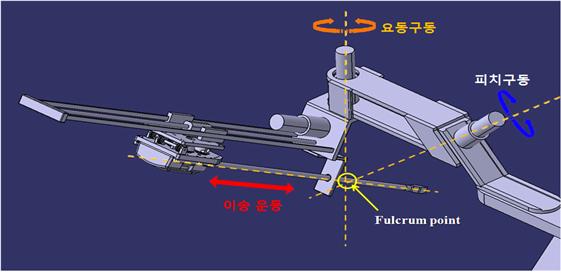
Study and development of sensorless haptic technology for laparoscopic surgery instruments
Development of reaction force estimation technology using perturbation observer
- Comparision of perturbation observer performance
- Study for problem analysis and improvement point using perturbation observer
- Experimental performance estimation for perturbation observer research conclusion
Development of force separation technology for haptic input signal application of reaction force
- Development for upper slave driving system of instrument
- Study for force interference analysis and operational force separation with upper slave-driving of instrument
Implementation of a haptic master system for sensing of surgery reality
- Development of haptic implementation master system
- Development of reaction force generation technology based on haptic master system and slave instrument kinematics for touch sense approximation
Development of compliance technology based on safety field
- Development of master system force compensation and stabilization technology for haptic function implementation
- A technology of surgery stability implementation for setting safety behavior range and safety range of operational force
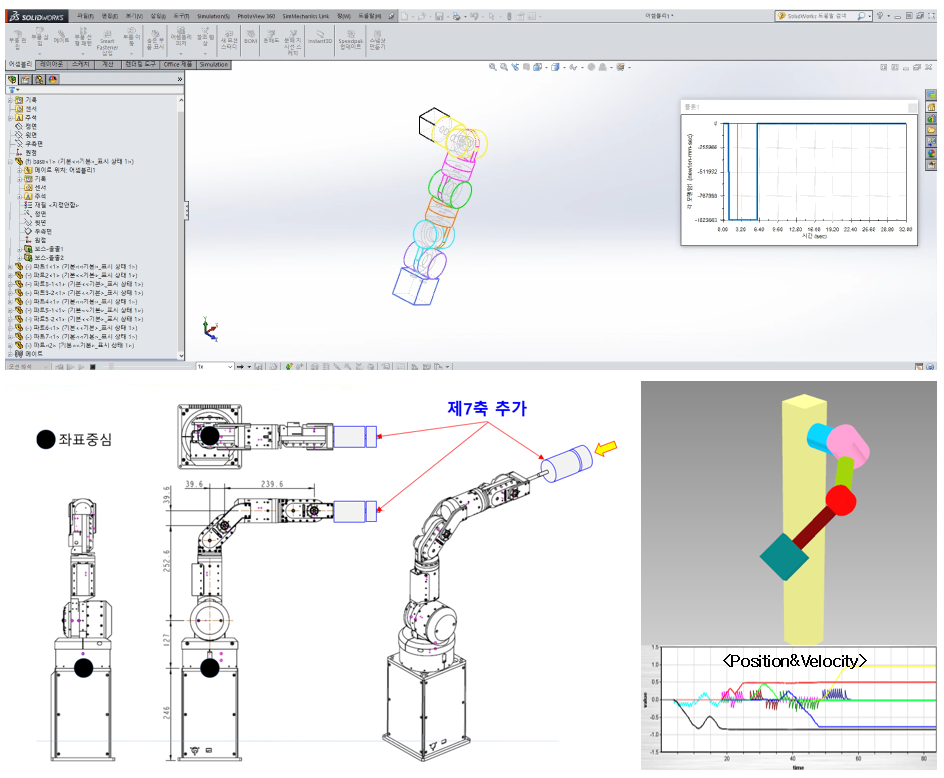
Study the development of active multi-DOF mechanical part assembly device
- Easy to change part and operation / possible for multi-product, small-sized production
- Replacement of jig and mold through work cooperation
- Quality uniformity acquisition for auto assembly
- Development of a simulation program for testing offline based on GUI teaching system about assembly working position and path